MATRICES
Opérations sur les matrices
Si on note a ik
le coefficient figurant à
l’intersection de la ième ligne et de la kième colonne d’une matrice A
,
b
ik pour la matrice B , c ik pour
la matrice C.
Si A
, B et C appartiennent à l’ensemble des matrices
à n lignes et p colonnes (M n p )on définit les opérations suivantes :
● addition C = A + B telle que c ik = a
ik + b ik

● multiplication
par un scalaire C = λA telle que c ik = λ
a ik
● produit d’une
matrice A à p lignes et n colonnes par
une matrice B à n lignes et s colonnes
Pour que AB soit
défini, il faut que le nombre de colonnes de A soit égal au nombre de lignes de
B
Si ( L i ) est un vecteur ligne de A et ( C k ) un vecteur colonne de B
Produit de matrices C = A.B tel que c ik = ( L i ) . ( C k
) Produit
scalaire de ( L i ) par ( C k )
C = AB est une matrice
à p lignes (comme A) et s colonnes (comme B) .

Opérations sur les matrices
et applications linéaires
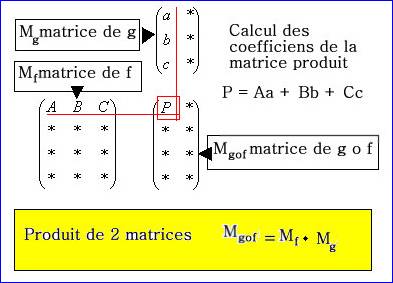
Si A est la matrice de
f et B la matrice de g :
● La somme de 2 matrices correspond à l’application somme de
2 applis de E dans F : f + g → A + B
● Le produit d’une matrice par un scalaire λ
correspond à l’application λf
: λf → λA
● Le produit d’une matrice A de M n p par une
matrice B de M p s correspond à g ○
f → A.B
Soit f une application linéaire de E dans F
de matrice A
Soit g une
application linéaire de F dans G de matrice B
![]()
![]()
![]()
![]() E (dim
n) f F (dim p) g
G (dim s)
E (dim
n) f F (dim p) g
G (dim s)
Alors C = A.B est la matrice de l’application g ○ f de E dans G (inversion de l’ordre d’écriture)
Matrice de l’identité dans E
(IE )
C’est une matrice
carrée dont tous les coefficients sont nuls sauf ceux de la diagonale
principale qui sont égaux à 1.
 On peut aussi appeler IE (ou I ) cette
matrice.
On peut aussi appeler IE (ou I ) cette
matrice.
Ensembles de matrices
M n, p ensemble des matrices à n lignes et p colonnes
Doté de l’addition et
de la multiplication par un scalaire M n p est un espace vectoriel .
On en construit une
base dite canonique grâce aux n.p matrices dont tous
les coefficients sont nuls sauf 1 (jamais le même). Par exemple
M = ![]()
M a pour coordonnées (5, 6, 7, 8) dans la base canonique de M22 qu’on appelle aussi M2 .
M n matrices
carrées d’ordre n
C’est aussi, bien sûr
un espace vectoriel mais de plus dans M n la multiplication des
matrices est
● associative, ● distributive à gauche et à
droite ● et elle admet un élément neutre (I )
Mais : Elle n’est pas commutative, pour la bonne raison qu’en général g ○ f différent de f ○ g.
Matrices carrées
M n est
l’ensemble des matrices carrées (n lignes, n colonnes)
● une application f de E dans E est associée à une matrice carrée
● une application f de E dans F est associée à
une matrice carrée si dim (E ) = dim (F )
● Une application bijective f est associée à une
matrice carrée (réciproque fausse)
Comme f est bijective , il existe (dans ce cas seulement) une
application réciproque f –1 elle aussi bijective Si la matrice A est associée à f , on appelle
A-1 la matrice associée à f-1 .
On dit alors que A est inversible et que A-1 est
la matrice inverse de A
.
● Calcul de
la matrice inverse
V = f(v) s’écrit
avec les matrices (V) = M.(v). Cela nous donne un système tel que
![]() X1 = x1a11 + x2a12
+ …..+xna1n
X1 = x1a11 + x2a12
+ …..+xna1n
………………………………
Xn = x1an1 + x2an2
+ …..+xnann
il suffit de le résoudre et on obtient
![]() x1=X1b11+X2b12+…+Xnb1n
x1=X1b11+X2b12+…+Xnb1n
…………………………………
xn=X1bn1+X2bn2+…+Xnb nn
Le premier système qui
définit f donnait les coordonnées de V en
fonctions de celles de v.
Le nouveau système
donne les coordonnées de v en fonction de celles de V. Il définit donc f-1
Les coefficients b ik de ce système forment la matrice A-1 associée à f-1.
● Matrice
de changement de base
Soit b et B deux bases
de E. Si un vecteur V a pour coordonnées
Vb=( x1, x2, .., xn) dans la base b il a d’autres coordonnées
VB
=( X1, X2, .., Xn ) dans la base B.
Le système qui permet
de calculer VB
en fonction de Vb a cette allure :
X1 = x1a11
+ x2a12 + …..+xna1n
…………………………………
Xn = x1an1 + x2an2
+ …..+xnann
Il lui correspond donc
une matrice carrée formée des coefficients a ik
qui est elle aussi inversible.
Un vecteur colonne de la matrice a ik exprime un vecteur bi de la
base b dans la base B. Ceux de la matrice inverse expriment les vecteurs de B
dans la base b.
Attention, la matrice M telle que VB = M Vb permet de calculer les coordonnées de V dans
la base B quand on connaît ses coordonnées dans la base b mais on l’appelle
« matrice de passage de la base B à la base b »
alors que ce devrait être le contraire. C’est une bizarrerie mathématique.
« Passage de B à
b » → VB
= M Vb
→ vecteurs colonnes b = f(B) (bi en fonction de B)
« Passage de b à
B » → Vb = M-1 VB → vecteurs colonnes B = f(b) (Bi en fonction de b)
● Toute matrice inversible peut être considérée comme
une matrice de changement de base.
On a M.M-1 = I où I
est la matrice carrée de l’identité (coefficient de la diagonale = 1, les
autres = 0)
On peut utiliser cette
relation pour calculer l’inverse d’une matrice en faisant le produit de M dont
les coefficients sont connus par une matrice dont les coefficients sont des
inconnues, puis en identifiant les coefficients du produit aux coefficients de
I.
Mais ce n’est pas la
méthode la plus simple ni la plus naturelle.
● Toute matrice carrée n’est pas forcement
inversible
● Matrice
carrée et système de n équations à n inconnues .
Soit M une matrice
carrée de Mn. J’écris (V) = M (v) ,
si je remplace les coordonnées de V par des nombres arbitraires, j’obtiens un
système de n équations à n inconnues dont les inconnues sont les coordonnées (x1
, x2 , … xn) de v . Résoudre ce système revient à trouver les
coordonnées de v connaissant celles de V . Si j’y
arrive, c’est que la matrice est inversible. Donc
● Soit le système admet n valeurs de xi
comme solutions et la matrice est inversible
● Soit ce n’est pas le cas et la matrice n’est
pas inversible
À l’inverse, pour
qu’un système admette n solutions, il faut que sa matrice soit inversible.
Soit par exemple le
système 5x + 3y -4 =0 (E1) et 2x + 7y = 8
(E2) . On l’écrit sous la forme
![]()
![]() E1 : 4 = 4x + 3y et sa matrice
est 4 3
(4, 8) sont les coordonnées de V et (x, y )
celles de v
E1 : 4 = 4x + 3y et sa matrice
est 4 3
(4, 8) sont les coordonnées de V et (x, y )
celles de v
E2 : 8 = 2x + 7y
2 7
● matrices triangulaires
Je sais que je si je
combine toute équation d’un système à une combinaison linéaire des autres,
j’obtiens un système équivalent. Je peux utiliser cette propriété pour essayer
d’annuler tous les éléments qui sont sous la diagonale principale de la
matrice. Par exemple :
![]()
![]() E1 : 4 = 4x + 3y je remplace E2
par 2.E2 – E1 j’obtiens E1 : 4 = 4x +
3y dont la matrice est
4 3
E1 : 4 = 4x + 3y je remplace E2
par 2.E2 – E1 j’obtiens E1 : 4 = 4x +
3y dont la matrice est
4 3
E2 : 8 = 2x + 7y
E3 : 12 = 0x + 11y
0 11
Une matrice dont tous
les éléments sous la diagonale sont nuls est dite « triangulaire »
Si il n’y a pas de
0 dans la diagonale d’une matrice triangulaire, la matrice est inversible et c’est aussi le cas de la matrice originelle
puisque le système d’équations ainsi obtenu est équivalent au premier. Il est
plus simple de calculer l’inverse d’une matrice triangulaire, mais s’il faut
commencer par la triangulariser, la difficulté est à
peu prés équivalente.
Modification de la matrice
d’une application linéaire par un changement de base
Soit M b B la matrice de f application linéaire de E
rapporté à une base b dans F rapporté à une base B.
● Si on change soit la base b pour b’ , soit la
base B pour B’ (ou les 2 à la fois), l’application linéaire continue à exister mais
sa matrice change de forme. Elle a toujours n lignes et p colonnes mais ses
coefficients ne sont pas les mêmes. Par exemple, on va appeler la nouvelle
matrice M
b B’ .
● On peut appeler B b
b’ la matrice du changement de base b → b’ qu’on appelle C b
et B B
B’ celle du changement de
base B → B’ qu’on appelle C B .
● de la même façon, on peut appeler f b B l’application quand elle est définie dans les bases
b et B
f b B’ l’application quand elle est
définie dans les bases b et B’
● on peut considérer que f b B’ est la composition de f b B
suivie du changement de base dans F :
C B.
![]()
![]() E b
FB
FB’
E b
FB
FB’
![]()
![]()
![]()
![]() vb f bB VB CB VB’
vb f bB VB CB VB’
![]()
![]() vb f
bB’
VB’
vb f
bB’
VB’
f
b B’ = C B ○ f b B .
On en déduit que M b B’ = M b B . B B B’
si le changement de base à lieu
dans F
Et si le changement de
base à lieu dans E : M b’ B = B–1bb’. M b B ou
B b’b . M bB
Il faut d’abord faire
le changement de base b’ → b qui est le changement réciproque de b → b’ avant de pouvoir appliquer
f b B qui est définie dans la base b .
Si les deux
changements de base, dans E et dans F sont simultanés M b’ B’ = B–1bb’.
M b B . B B B’ .
(En rouge l’ancienne matrice de f , en bleu la
matrice de f après changement de base, en noir les matrices de changements de
base)
Deux matrices M et M’ sont dites équivalentes si
il existe 2 matrices inversibles A et
B telles que M’=AMB
C’est donc le cas de M b’ B et M b B
Si M et M’ sont 2 matrices carrées de M n liées à la même
application mais dans 2 bases différentes, si on appelle B la matrice de
changement de base on aura M’ = B–1MB et les matrices seront
dites semblables.
Vecteurs propres, valeurs
propres
Soit f une application linéaire dans E . Sa
matrice est carrée et appartient à M n.
Si il existe des vecteurs x non nuls colinéaires à leur image c'est-à-dire
tels que f(x) = λx (λ Î R
) on les appelle des vecteurs propres.
Dans ce cas, tout vecteur colinéaire à x est un vecteur propre, mais λ est
unique pour les vecteurs du sous espace engendré par {x} car si f(kx) = kλ’x
= kf(x) = kλx on a
forcément λ’=λ. λ est appelé valeur propre associée au
vecteur propre x (et à toute sa famille) .
Si il existe une base b de E formée de n vecteurs propres {bi}
chacun étant associé à une valeur propre λi
.
Alors, on a pour tout vecteur de la base f ( b
i ) = λ i . b i et la matrice de f dans cette
base s’écrit par exemple:
La diagonale principale est formée des valeurs propres et les autres coefficients sont nuls. Une telle matrice est dite « diagonale ».
Une matrice pouvant être transformée en une matrice diagonale par un changement de base est dite « diagonalisable ».
Par exemple, la
matrice d’une rotation d’angle π est diagonalisable, puisque f(x) = – x .
Opérations élémentaires sur
les matrices
Le rang
de f est la dimension de Im (f) . C’est aussi le rang de la matrice M associée à f. Et aussi le rang du système de
vecteurs lignes ou colonnes de la matrice. (combien sont linéairement
indépendants ?)
On appelle opérations élémentaires sur M
1) la permutation
de 2 lignes (resp. colonnes) ce qui revient à inverser l’ordre des
vecteurs d’une base
2) l’ajout à une
ligne (resp. colonne) d’une combinaison linéaire d’autres lignes (resp.
colonnes) , ce qui revient à remplacer un vecteur d’une
base par un vecteur qui reste indépendant des autres.
3) La multiplication
d’une ligne (resp. colonne) par un scalaire λ non nul ce qui revient à diviser par λ un vecteur
d’une base.
En fait, les
opérations élémentaires reviennent à modifier partiellement une base et la
remplacer par une autre. Les opérations élémentaires sur M transforment M en
une matrice M’ de même rang.
Et deux matrices de
même rang sont équivalentes. (La
réciproque est vraie) .
Donc, quand on procède
à une opération élémentaire sur M, on obtient une nouvelle matrice M’ qui peut
être considérée comme liée à l’application f si on choisit convenablement la
base b’ de E et la base B’ de F.
Retour sur les applications
linéaires
Soit f application
linéaire de E de dimension n dans F de dimension p .
Ker (f ) est un sous
espace vectoriel de E de dimension r .
Donc E est égal à la
réunion de 2 SEV disjoints Ker (f) et son
supplémentaire qu’on appellera G.
● G est un SEV de dimension n – r qui
admet comme base { b 1,……,b n– r }
Ker (f ) est un sous
espace vectoriel de dimension r qui
admet comme base { b n – r + 1 , ……., b n }
Et la réunion de ces 2
bases B = { b 1 , …….. , b n } forme une base de
E .
● les images des vecteurs de la base de G
forment un système libre de n – r vecteurs dans F .
En effet, s’il existait des scalaires λ i
non tous nuls, tels que λ1
f( b 1) + ……+ λ n – r f (b n–
r )= 0
On aurait f( λ1b 1 + ……+
λ n – r b n– r ) = 0 et λ1b 1
+ ……+ λ n – r b n– r appartiendrait au noyau ker ( f ) ce qui est
incompatible avec nos hypothèses (ce vecteur appartient au supplémentaire du
noyau) .
● On en déduit au passage que la restriction de
f à G supplémentaire de Ker ( f ) est injective.
● Donc {
f ( b 1 ), …….. , f ( b n – r ) } système de vecteurs
linéairement indépendants de F peut être
complétée par p – ( n – r ) vecteurs de F choisis pour former une base de F.
Appelons B’ cette base de F .
● Si on prend un vecteur de la base B , son image par f s’écrira dans la base
B ‘ :
Pour i ≤
n – r : f (b i ) = ( 0, 0, ….., 0 , 1 , 0 , …..0) seule sa ième
coordonnée n’est pas nulle
Pour i
> n – r : f ( b i
) = (0 , …………………….., 0) puisque b i appartient au noyau .
● Donc, si on choisit B comme base de E et B’
comme base de F , la matrice de f s’écrira par exemple :
M = 
De cette écriture on déduit ● que Im
( f ) est de dimension 4 donc que la
matrice et f sont de rang 4 (quatre
1 dans la diagonale) . ● Que Ker ( f) est
de dimension 2 (2 colonnes de 0 ) ● Que l’application n’est pas surjective
(une ligne de 0 ) et que Dim F = Dim (Im ( f
) ) + 1
● Soit une autre application linéaire de rang 4
de E dans F , on va pouvoir par le même procédé, la transcrire en une matrice égale à M (mais dans d’autres
bases) . C’est donc que 2 matrices de même rang sont équivalentes.
● Si une matrice 5 x 6 telle que M est de rang 4
, c’est que je peux annuler 2 des ses vecteurs colonnes et un de ses vecteurs
lignes en leur ajoutant une combinaison linéaire des autres et par d’autres
opération élémentaires obtenir une matrice semblable à M
● Si l’application est bijective, en choisissant
les bases B et B’ selon le même procédé,
on peut l’écrire sous la forme d’une matrice carrée dont la diagonale
est formée de 1 , les autres coefficients étant nuls.
Mais s’agissant d’une
application de E dans F il ne faut pas la confondre avec l’identité.
Par exemple pour une
rotation dans le plan :
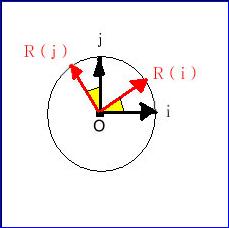 Si le plan de départ et le plan d’arrivée sont
rapportés à la base {i , j}, la matrice de la rotation
est
Si le plan de départ et le plan d’arrivée sont
rapportés à la base {i , j}, la matrice de la rotation
est ![]()
Mais si on garde {i , j } pour le
plan de départ et on pend {R ( i), R
(j)} pour le plan d’arrivée la matrice
de la rotation devient ![]()
Si on modifie l’ordre
de la base d’arrivée {R (j) , R(i)} la matrice
devient : ![]() (Permutation des
vecteurs lignes)
(Permutation des
vecteurs lignes)
Si je prends pour base d’arrivée {R (j) , ![]() } la matrice devient
} la matrice devient ![]() (multiplication de la
ligne 2 par λ)
(multiplication de la
ligne 2 par λ)
Et ainsi de suite, on peut retrouver sur cet exemple tous les changements de base correspondant aux opérations élémentaires sur les matrices.
Dans tous les cas, si on garde la base de départ { i , j } la première colonne sera R ( i) et la seconde R (j) puisque ce sont les images de la base de départ par R, mais les coordonnées de R ( i ) et de R (j) changeront selon le choix de la base d’arrivée.
Une modification sur les lignes impacte la base de F, une
modification sur les colonnes, la base de E.