ESPACES VECTORIELS sur R
Définition
E muni d’une addition (+) et d’une multiplication par
un nombre réel est un espace vectoriel sur R si pour tous
les réels k, k1 et k2,
pour tous les éléments v, v1 et v2 de E
● (E, +) est un
groupe commutatif d’élément neutre noté 0E (ou 0) (l’opposé de v est
noté –v)
● k1 (k2v) = (k1k2) v
● (k1+k2)v
= k1v + k2v
● k(v1
+ v2)=kv1 + kv2
● 1v =
v
L’addition des vecteurs et la
multiplication d’un vecteur par un scalaire (définies avec l’espace vectoriel)
ne seront pas confondues avec l’addition et la
multiplication dans R bien qu’on utilise souvent la même notation.
On définit de la même façon
un espace vectoriel sur C ou sur n’importe quel corps K.
Base d’un espace vectoriel
● k1v1 + …+ knvn est une combinaison
linéaire de vecteurs de E
● Dans E, n vecteurs (v1, …vn) sont dits linéairement
indépendants si on ne peut pas trouver n scalaires k1 , k2 , …, kn tels que
k1v1
+ …+ knvn = 0E.
● Si les n vecteurs ne sont pas
linéairement indépendants, ils sont liés,
ce qui veut dire qu’on peut exprimer un vecteur en fonction des n – 1 autres
par exemple v1 = – 1/k1
(k2v2+….+knvn)
● n
vecteurs linéairement indépendants forment la base d’un espace vectoriel
L’ensemble
des combinaisons linéaires des vecteurs de la base a une structure d’espace
vectoriel.
On
dit que cet espace vectoriel est engendré par la
base à partir de laquelle on l’a formé.
●Soit b = { b1, …., bn} un ensemble de n vecteurs linéairement indépendants
de E
Si
l’ensemble des combinaisons linéaires des vecteurs de b est E , on dit que
b est une base de E.
Si
cet ensemble est inclus dans E il forme
un sous espace vectoriel de E.
● Si b = { b1, …., bn} est une base de E . E est dit de dimension
n
● une
droite vectorielle est un espace vectoriel de dimension 1 , un plan vectoriel
est de dimension 2 .
Notre
étude se bornera à l’étude des espaces vectoriels de dimension finie.
● Dans tout
espace vectoriel, il y a forcément le vecteur nul (combinaison linéaire avec n
scalaires nuls).
Dans
un espace vectoriel de dimension n , tout ensemble de
n + 1 vecteurs est lié
Dans
cet espace vectoriel, toute ensemble de n vecteurs linéairement indépendants
est une base.
● Tout vecteur
est écrit comme une combinaison linéaire unique
des vecteurs de sa base et les scalaires de cette combinaison linéaire sont
appelés coordonnées
● Dans E v =
x1b1 + x2b2 + ….+ xnbn (xi
coordonnées de v dans la base b)
● Le
vecteur b i peut être
considéré comme un vecteur dont toutes les coordonnées sont nulles sauf la ième qui est égale à 1.
b i =
(0, 0, …., 0 , 1, 0, …., 0)
Changements de base
● Dans
un espace vectoriel, E, on peut choisir
une infinité de bases.
● Dans
la base b un vecteur de E s’écrit de façon unique v = x1b1 + x2b2
+ ….+ xnbn
● Si on
change de base, un vecteur change de
coordonnées .
● pour changer de base, il faut qu’on nous donne la
nouvelle base b’ en fonction de l’ancienne b
On a
par exemple
![]() b’1 = a11b1+……a1nbn
b’1 = a11b1+……a1nbn
( ……………………. ) (n
équations)
b’n = an1b1 + …+ ann
bn
● On résout le système pour
trouver b1, …., bn dans la base b’
![]() b1 = A11b’1+……A1nb’n
b1 = A11b’1+……A1nb’n
( ……………………. ) (n
équations)
bn = An1b’1 + …+ Ann b’n
● Puis, dans v = x1b1 + x2b2
+ ….+ xnbn on
remplace b1, …., bn par leur valeur dans la base b’
● Et on trouve v = x’1b’1 + x’2b’2
+ ….+ x’nb’n
où x’1, …,x’n sont les
nouvelles coordonnées de v dans la base b’
● L’application qui dans R n
fait correspondre aux coordonnées d’un vecteur
(x1 , x2
, …., xn) dans la
base b les coordonnées du même vecteur dans la base b’ (x’1,
x’2, …., x’n) est une
application bijective.
Ce qui signifie qu’il existe
un changement de base réciproque nous faisant passer de la base b’ à la
base b.
F sous espace vectoriel de E
Une partie F de E est un sous
espace vectoriel si elle a une structure d’espace vectoriel.
● Pour démontrer que F est un SEV il
suffit de démontrer que F est stable pour les lois de E c'est-à-dire :
|
Tout V ∈ F et tout k ∈ R ➜ kV ∈ F Tout V1 ∈ F et tout V2 ∈ F ➜ V1 + V2
∈ F |
Les
autres propriétés sont implicites puisque héritées de E.
● Tout SEV
contient forcément le vecteur nul
● Le
vecteur nul forme à lui tout seul un SEV.
● Dim (F) ≤ Dim (E) (E peut être considéré comme un SEV de
lui-même)
● Si Dim (F) = p et Dim (E) = q ,
si b = { b1, …., bp} est une base de F alors on
peut former une base de E en adjoignant à la base b de F
q – p vecteurs {b p+1 , …., b
q} tels
que le système b’ ainsi formé soit libre.
● De la
même façon, il existe une base b’ de E b’ = { b1, …., bq} telle qu’on puisse en extraire p vecteurs qui forment
une base de F.
● Les
plans vectoriels et les droites vectorielles sont des SEV d’un espace vectoriel
de dimension 3.
●
Seules les droites vectorielles parallèles à un plan sont des SEV de ce plan
(une droite vectorielle qui n’est pas parallèle au plan n’est pas contenue dans
le plan).
Applications dans les
espaces vectoriels
Dans
le cas général E est un espace vectoriel rapporté à une base b
F est
un espace vectoriel rapporté à une base b’
E et
F ne sont pas forcément de même dimension. Par exemple Dim
(E ) = n et Dim (F ) = q .
Une
application f de E dans F fait correspondre à un vecteur V de E un vecteur
image V’ dans F
f :
E ➜ F
f : V ➜ V’ = f(V)
● On peut
définir f de multiples façons mais la plus courante et celle qui permet de
déterminer les coordonnées de V’ dans la base b’ en fonction des coordonnées de
V dans la base b.
(x1
, x2 , …., xn) ➜(x’1, x’2, …., x’p)
On
aura donc p équations pour définir (x’1, x’2, ….,
x’p) en fonction de (x1
, x2 , …., xn).
● On peut
aussi définir des applications dans E (F = E) ou de E dans une partie de E,
rapportés à une même base ou à des bases différentes.
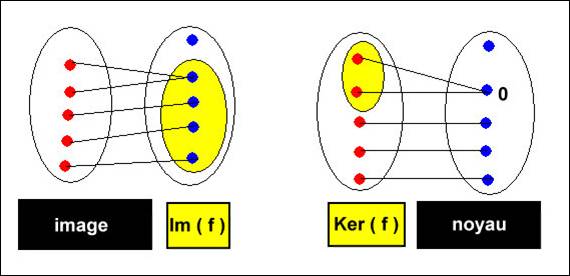
● On
appelle image de
f notée Im ( f)
l’ensemble des images des éléments de E données par f .
On peut écrire Im
( f) = f ( E) . C’est
soit F soit un sous ensemble de F .
Si f est surjective Im
( f ) = F
● On
appelle noyau de
f , noté Ker ( f ) , l’ensemble des éléments
de E qui ont pour image 0F .
Si f est injective Ker
( f ) est réduit à un seul élément qui n’est pas
forcément 0E .
Exemples d’espaces
vectoriels
● Les vecteurs
du plan (base { i , j
} , coordonnées X et Y telles que
V = X i + Y j )
● Les
polynômes de degré ≤ 2 à coefficients dans R (base x2 , x , 1}, coordonnées les
coefficients a, b , c )
● R2 (base {( 1 ,
0) , (0, 1) } coordonnées a, b tels que a.(1, 0) + b .(0,1) = (a , 0) +
(0 , b) = (a , b) )