Déterminant d’une matrice
carrée
Ordre 2 :
le
déterminant de M = ![]() est noté
est noté ![]() et évalué à det (M)
= ad – bc
et évalué à det (M)
= ad – bc
Le déterminant
d’une matrice est donc un nombre réel obtenu en combinant ses
coefficients selon une recette particulière.
Ceci
dit, on va voir que quand on sait calculer le déterminant d’ordre n , on sait aussi calculer le déterminant d’ordre n+1.
Ce
qui signifie que si l’on sait calculer un déterminant d’ordre 2, on va pouvoir,
sans trop de difficultés, calculer les déterminants d’ordre 3, 4, et plus.
Ordre 3 :
Comment
calculer le déterminant suivant  ?
?
● Les signes
affectés aux coefficients (signes de position)
seront :
 On attribue un + à a11 puis on alterne dans une ligne
ou colonne quand l’indice croit
On attribue un + à a11 puis on alterne dans une ligne
ou colonne quand l’indice croit
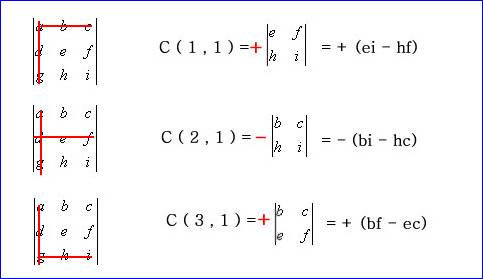
● En barrant
la 1ere colonne et successivement la 1ere ligne puis la 2e , puis la
3e , comme dans l’encadré ci-dessous, ce qui reste visible dans
chaque cas est une matrice d’ordre 2 dont on sait calculer le déterminant .
On
calcule ce déterminant affecté du signe de position de a i k et on appelle le résultat
cofacteur de a i k , a i k étant le coefficient de la
première colonne dont la ligne a été barrée.
Le cofacteur de a i k est un nombre que nous noterons c (
i , k )
● Le
déterminant de la matrice d’ordre 3 est égal à la somme des a i k . c(i,k)
det (M) = = ![]() = +a (ei – fh)
– d ( bi – hc)+ g (bf
– ec)
= +a (ei – fh)
– d ( bi – hc)+ g (bf
– ec)
● cette façon de faire utilise
pour le calcul exclusivement les coefficients de la 1ere colonne et leur cofacteur.
On
dit qu’on développe le déterminant par rapport à la première colonne mais
on aurait pu le développer de la même façon par rapport à n’importe quelle
colonne ou n’importe quelle ligne.
● Si on développe le déterminant
par rapport à la 1ere colonne, il revient au même d’affecter à a le signe +
, à d le signe – et à g le signe +
. On multiplie chaque coefficient affecté de son signe par le déterminant de la
matrice d’ordre 2 qu’on obtient en barrant la ligne et la colonne du
coefficient et on fait la somme.
Mais
on ne perd pas de vue qu’en réalité c’est c ( i , k)
qui intègre le signe de position.
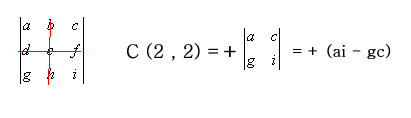
Chaque
coefficient de la matrice a un cofacteur construit en
affectant de son signe de position le déterminant obtenu quand on barre sa
ligne et sa colonne.
Par
exemple, c (2 , 2) cofacteur de a22
est
● Tout coefficient ayant un cofacteur ; il est possible de développer le déterminant par rapport à
n’importe quelle ligne ou colonne, mais exclusivement par rapport à une ligne
ou à une colonne.
Dans
chaque cas, le déterminant calculé sera le même nombre.
Plus
il y a de 0 dans une ligne ou une colonne plus on a intérêt à développer le
déterminant par rapport à elle. Les calculs s’en trouvent facilités.
Remarques :
● Quel que
soit l’ordre de la matrice, la règle qui permet d’affecter les signes de
position est la même
● On peut
définir un déterminant d’ordre 1 comme le nombre qui reste visible quand on
barre une ligne et un colonne dans une matrice d’ordre 2 . Dans ce cas, la
procédure qui nous permet de calculer un déterminant d’ordre 2 connaissant les
déterminants d’ordre 1 est la même que celle qui nous permet de calculer un
déterminant d’ordre 3 connaissant les déterminants d’ordre 2.
Quand
on sait calculer un déterminant d’ordre 3 , on sait
calculer un déterminant d’ordre 4 .
● Par
récurrence, on peut calculer tous les déterminants quel que soit leur ordre.
Propriétés des déterminants
● Si on
appelle L1, L2 , L3 les vecteurs lignes de la matrice M et C1, C2, C3 ses
vecteurs colonnes qu’on sait appartenir à l’espace vectoriel Rn (Kn dans le cas général) .
On
peut noter det (M) soit det
(L1, L2, L3) soit det (C1, C2, C3)
Alors,
on a det (L1, L2, L3) + det
(L1, L’2 , L3) = det (L1,
L2+L’2 , L3)
Idem pour les colonnes
Et det (L1 , λL2 , L3)
= λ det (L1, L2 , L3)
Idem
pour les colonnes.
Donc
si A et B sont des vecteurs fixes et X un vecteur variable
on
peut considérer que l’application X → det (A, X, B) est une application linéaire de Rn
dans R .
● Règle importante : si le déterminant d’une
matrice est non nul, la matrice est inversible et si il est nul, la matrice n’est pas
inversible
Pratiquement
● Si
deux lignes sont identiques ou si l’une est le produit de l’autre par un
scalaire
(L3 =
λL1 ) ( système
lié , matrice non inversible), le déterminant est nul
det
(L1, L1, L3) = 0
● Donc
, si on ajoute à une ligne une combinaison linéaire des autres le déterminant
est inchangé
det
(L1, L2+K1L1+K2L3
, L3) = det (L1,L2,L3) + K1 det (L1,L1,L3) + K2(L1,L3,L3) = Det(L1,L2,L3)+0+0
● On a
donc intérêt à ajouter à une ligne (ou colonne) d’autres lignes ou combinaisons
d’autres lignes (ou colonnes) pour obtenir un maximum de coefficients nuls dans
cette colonne et développer le déterminant par rapport à cette ligne (ou
colonne). Le calcul en sera facilité.
● Si on
échange deux lignes le déterminant est multiplié par –1 :
det(L1,L2,L3) = – det
(L2,L1,L3)
En
effet :
det(L1,L2,L3)
= det(L1+L2,L2,L3)=det(L1+L2,
-L1,L3)=det(L2,-L1,L3) = – det(L2,L1,L3)
On
remplace L1 par L1+L2 puis L2 par L2 – (L1+L2) , puis
L1+L2 par (L1+L2) – L1, puis linéarité
● Si A
est une matrice de M n det(λA) = λn det (A)
● le
déterminant d’une matrice triangulaire est égal au produit des coefficients de
sa diagonale
Calcul de la matrice inverse
à partir des cofacteurs et du déterminant
Cofacteurs
Quand
je développe le déterminant par rapport à la colonne 1 j’ai une formule du type
Det (M) = a 11 .
C( 1, 1) + a 12 . C (1,2) + …. + a 1n . C(1,n)
C( i ,
k ) incluant le signe de position
Idem
quand je développe le déterminant par rapport à une autre colonne ou à une
autre ligne.
Donc,
à chaque a ik il correspond un nombre C ( i
, k ) qu’on appelle son cofacteur .
C’est
le déterminant obtenu en supprimant la ligne i et la colonne k
, affecté du signe de position .
Cofacteurs et matrice inverse
En
calculant tous les cofacteurs, je peux faire correspondre à la matrice M une
matrice dont les coefficients b ik sont de la forme ![]() . J’appelle cette matrice m .
. J’appelle cette matrice m .
● On obtient
la matrice transposée tM d’une matrice M en échangeant ses
coefficients
a
ik et a ki ce qui revient à construire la matrice
symétrique de M par rapport à la diagonale principale.
● la transposée de m (dérivée de M grâce aux cofacteurs divisés par le
déterminant de M) est M-1 matrice inverse de M.
●
Exemple
M = ![]() admet pour cofacteurs
admet pour cofacteurs ![]() et pour déterminant det(M) =
2 – 3 = – 1
et pour déterminant det(M) =
2 – 3 = – 1
La
matrice correspondante m obtenue grâce aux cofacteurs divisés par le
déterminant est
m =  .
.
La
transposée de m est ![]() . C’est M–1
. C’est M–1
En
effet si
X =
2x + 3y on a aussi x = –X + 3Y
Y = x
+ y y = X – 2Y
(Matrice
M)
(Matrice M–1)
Ceci
dit, on a plus vite fait de résoudre le système en considérant que X et Y sont
connus et x et y inconnus.